gpOptimizer.optimize: A Simple Black-Box Optimization#
## First, install the latest version of gpCAM and matplotlib
#!pip install gpcam==8.4.0
#!pip install matplotlib
Setup#
import numpy as np
import matplotlib.pyplot as plt
from gpcam import GPOptimizer
from gpcam import fvGPOptimizer
import time
%load_ext autoreload
%autoreload 2
from itertools import product
x_pred1D = np.linspace(0,1,1000).reshape(-1,1)
Data Prep#
def f1(x):
if np.ndim(x) == 1: return (np.sin(5. * x) + np.cos(10. * x) + (2.* (x-0.4)**2) * np.cos(100. * x)), 0.01
else: return (np.sin(5. * x[:,0]) + np.cos(10. * x[:,0]) + (2.* (x[:,0]-0.4)**2) * np.cos(100. * x[:,0])), np.zeros(len(x)) + 0.01
def f2(x):
if np.ndim(x) == 1:
res = np.array([f1(x)[0], -f1(x)[0]/3.]).reshape(2), np.array([0.01,0.01])
return res
else:
res = np.column_stack([f1(x)[0], -f1(x)[0]/3.]).reshape(len(x),2),\
np.array([np.zeros(len(x)) + 0.01, np.zeros(len(x)) + 0.01]).reshape(len(x),2)
return res
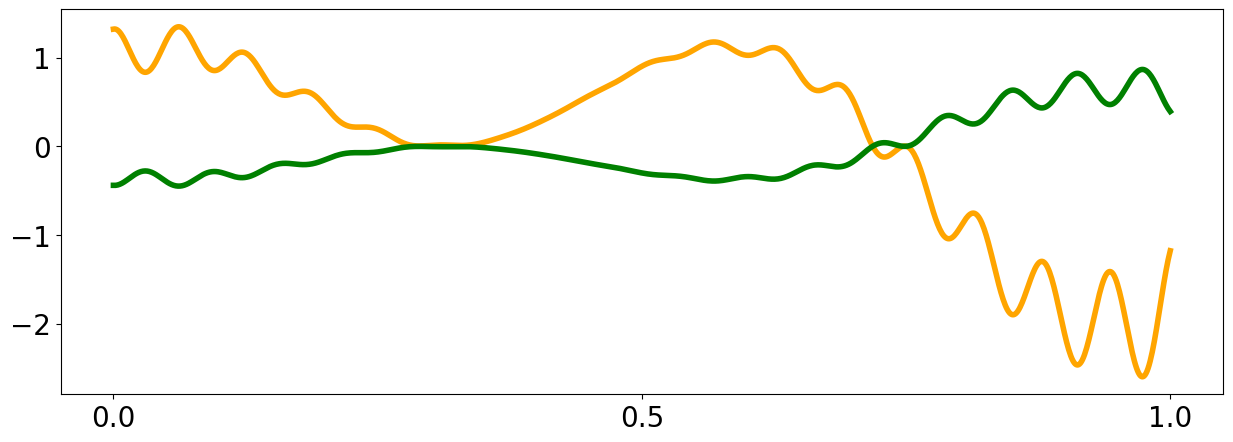
plt.figure(figsize = (15,5))
plt.xticks([0.,0.5,1.0])
plt.yticks([-2,-1,0.,1])
plt.xticks(fontsize=20)
plt.yticks(fontsize=20)
plt.plot(x_pred1D,f1(x_pred1D)[0], color = 'orange', linewidth = 4)
plt.plot(x_pred1D,f2(x_pred1D)[0][:,1], color = 'green', linewidth = 4)
[<matplotlib.lines.Line2D at 0x7f6b0d67d9d0>]
Initialization and Optimization for a Scalar Valued Function#
from IPython.display import clear_output
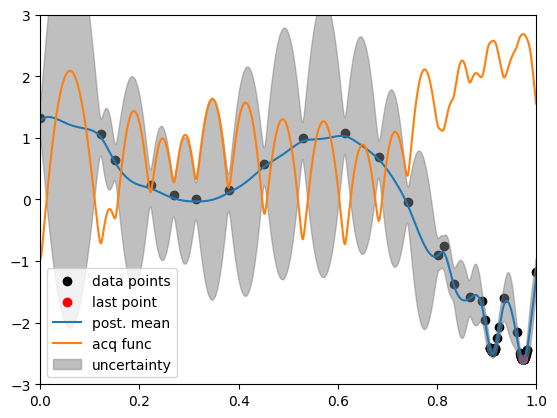
my_gp1 = GPOptimizer()
def callb(x,y): #OPTIONAL FUNCTION FOR PLOTTING
clear_output(wait=True)
plt.scatter(x, y, color = 'black', label = "data points")
plt.scatter(x[-1], y[-1], color = 'red', label = "last point")
m = my_gp1.posterior_mean(x_pred1D)["m(x)"]
s = np.sqrt(my_gp1.posterior_covariance(x_pred1D)["v(x)"])
plt.plot(x_pred1D, m, label = "post. mean")
plt.plot(x_pred1D, -(m-3.*s), label = "acq func")
plt.fill_between(x_pred1D.flatten(), m-3.*s, m+3.*s, label = "uncertainty", color = "grey", alpha = .5)
plt.xlim([0,1])
plt.ylim(-3,3)
plt.legend(loc = 'lower left')
plt.show()
result = my_gp1.optimize(func = f1, search_space = np.array([[0,1]]), callback=callb)
Initialization and Optimization for a Vector Valued Function#
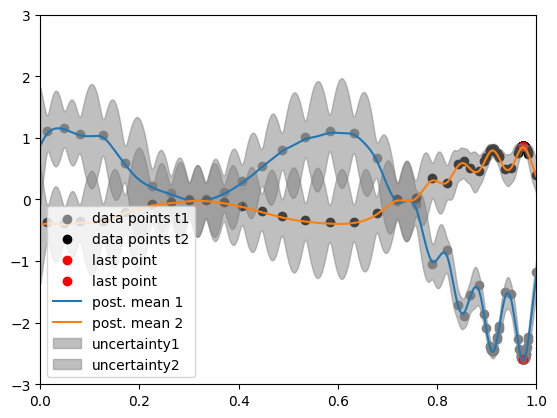
from IPython.display import clear_output
my_gp2 = fvGPOptimizer()
def callb(x,y): #OPTIONAL FUNCTION FOR PLOTTING
task_ind0 = np.where(x[:,1]==0.)[0]
task_ind1 = np.where(x[:,1]==1.)[0]
clear_output(wait=True)
y1 = y[task_ind0]
y2 = y[task_ind1]
x = x[task_ind0,0:1]
plt.scatter(x[:,0], y1, color = 'grey', label = "data points t1")
plt.scatter(x[:,0], y2, color = 'black', label = "data points t2")
plt.scatter(x[-1,0], y1[-1], color = 'red', label = "last point")
plt.scatter(x[-1,0], y2[-1], color = 'red', label = "last point")
m = my_gp2.posterior_mean(x_pred1D, x_out = np.array([0,1]))["m(x)"]
s = np.sqrt(my_gp2.posterior_covariance(x_pred1D, x_out = np.array([0,1]))["v(x)"])
m1 = m[:,0]
m2 = m[:,1]
s1 = s[:,0]
s2 = s[:,1]
plt.plot(x_pred1D, m1, label = "post. mean 1")
plt.plot(x_pred1D, m2, label = "post. mean 2")
#plt.plot(x_pred1D, -(m-3.*s), label = "acq func")
plt.fill_between(x_pred1D.flatten(), m1-3.*s1, m1+3.*s1, label = "uncertainty1", color = "grey", alpha = .5)
plt.fill_between(x_pred1D.flatten(), m2-3.*s2, m2+3.*s2, label = "uncertainty2", color = "grey", alpha = .5)
plt.xlim([0,1])
plt.ylim(-3,3)
plt.legend(loc = 'lower left')
plt.show()
result = my_gp2.optimize(func = f2, search_space = np.array([[0,1]]), callback = callb)